
800 g
5 mm
0 .. 50°C
ambient
1 nm
ECSz3030/Al/NUM/RT
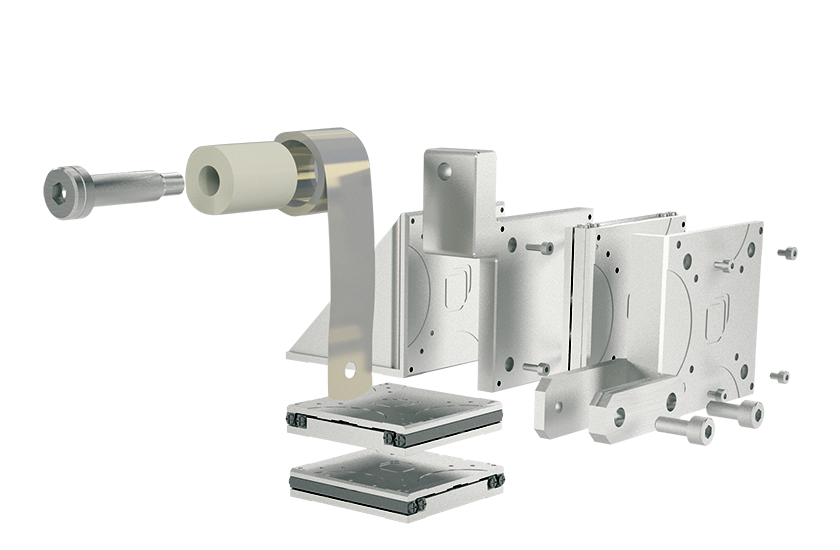
compact linear bearing based nanopositioner for vertical motion
The ECSz3030 is dedicated for vertical movement with a drive force of up to 8N with a compact footprint. It provides high-resolution z-positioning, and its high guiding accuracy is achieved with crossed roller bearings.
The positioner is designed for ambient conditions (/RT).
Our aluminum models combine a powerful piezoelectric motor with a lightweight body for easy integration in setups in atmospheric conditions.
Specifications
For a detailed definition of used terms and descriptions please visit our Nanopositioners Glossary
| Size and Dimensions | |
|---|---|
| footprint; height | 30 mm x 31 mm; 31.5 mm |
| maximum installation space | 30 mm x 36.1 mm; 36.5 mm |
| weight (aluminium version) | 90 g |
| height | 31.5 mm |
| Materials | |
| positioner body | aluminum |
| actuator | PZT ceramics |
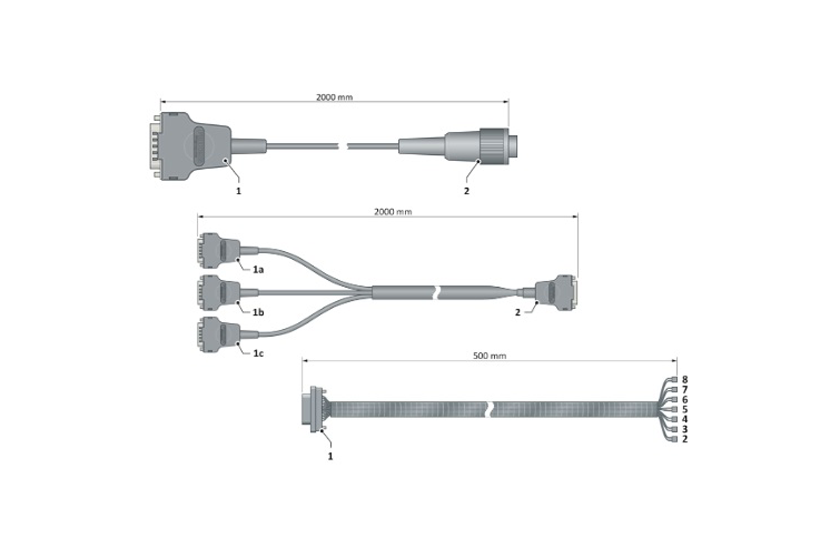
| connecting wires | copper, jacket: RT: Teflon/PTFE |
| Coarse Positioning Mode | |
| travel range (step mode) | 5 mm |
| maximum drive velocity @ 300 K | 2 mm/s |
| input voltage range | 0 - 45 V |
| Fine Positioning Mode | |
| fine linear positioning range @ 300 K | 0.8 µm |
| fine positioning resolution | sub-nm |
| input DC voltage range | 0 - 45 V |
| Position Encoder | |
| readout mechanism | optoelectronic sensor |
| encoded travel range | entire travel |
| sensor resolution | 1 nm |
| sensor power (when measuring) | 300 mW |
| repeatability | 50 nm (bidirectional) |
| Load (@ ambient conditions) | |
| maximum load | 800 g |
| maximum dynamic force along the axis | 8 N |
| General Specifications | |
| environment | /RT |