









Your partner in nanoscale applications.
attocube is a leading pioneer for nanotechnology solutions in industry and research. We deliver cutting edge components and systems for precision motion and nanopositioning applications, cryogenic microscopy, and nanoscale analytics within three business sectors:

Products
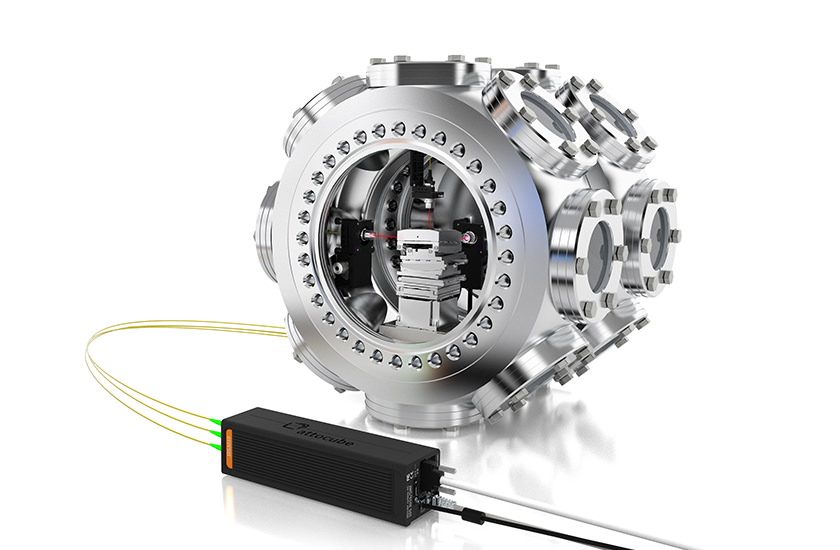
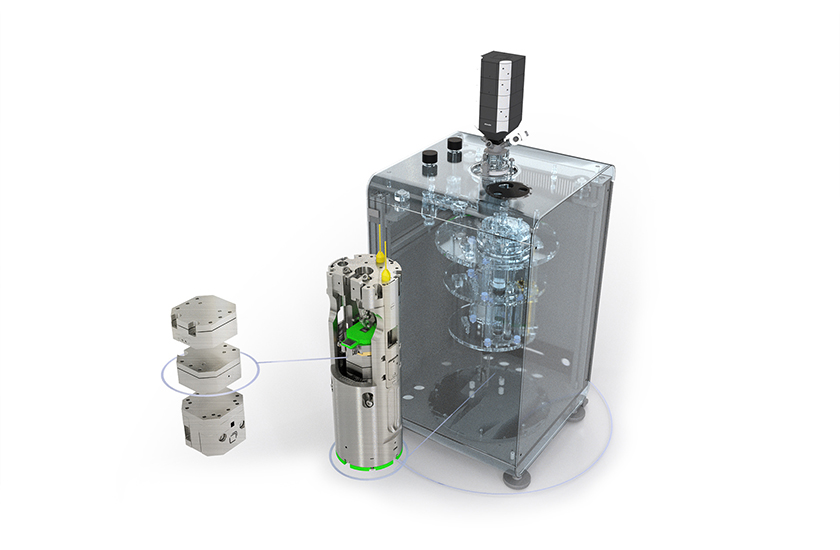
attocube’s product portfolio ranges from precision motion components such as nanopositioners and displacement-measuring interferometers, to measurement platforms such as scanning probe microscopes and closed-cycle cryostats for scientific applications, as well as turnkey solutions for materials science and nano-FTIR. The instruments and components are designed to function flawlessly in conditions from ambient to ultra-low temperature, and from high magnetic fields to ultra-high vacuum.





Applications
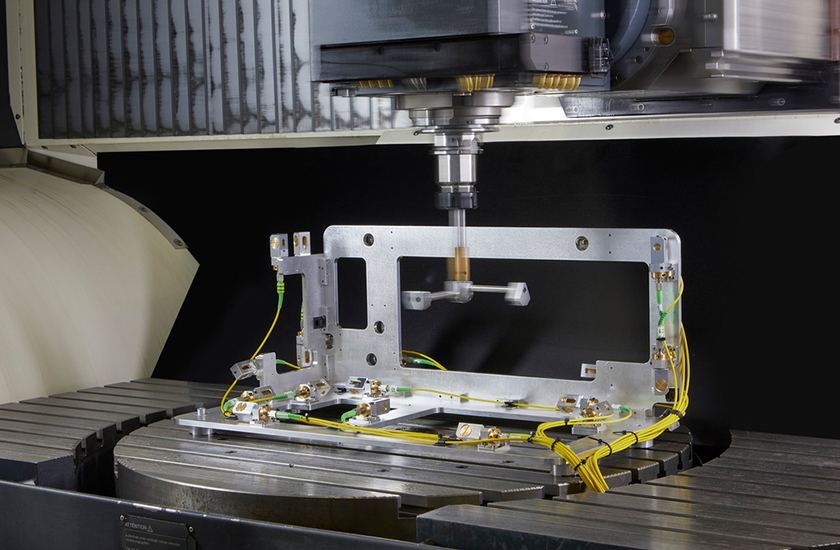
Our instruments enable technological leaps in industrial applications involving nanoprecise motion and sensing tasks. They also foster scientific breakthroughs in fundamental and applied research in physics and materials science on the nanoscale. Whether your task at hand involves precise positioning or the motion control of wafers, imaging and spectroscopy of quantum dots, superconductors or other mesoscopic samples – attocube is your partner for nanoscale solutions!


Exhibitions

Advancing technology standards in industry and research.
Since 2001, attocube has been at the forefront of applied nanoscience, delivering unique and innovative products to customers all over the world. Our common passion is to redefine precision and create products that work at the very edge of technical and physical feasibility.
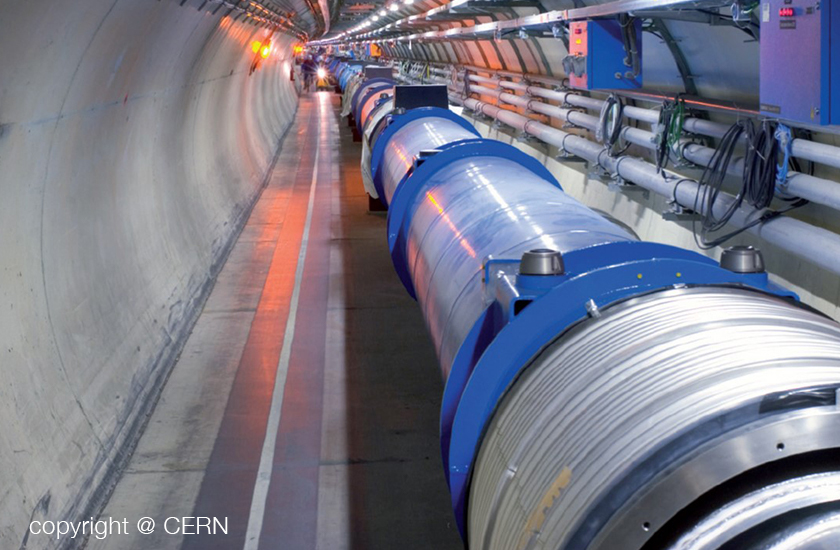
High-level scientific publications have been produced based on attocube’s products. Several Nobel Prize winners work with our solutions. And industry customers from a wide range of sectors rely on our profound knowledge and experience of working in the smallest of dimensions.
The expertise and motivation of our team guarantees top-quality consulting, and we offer a comprehensive on-site installation service, and professional after-sales support.
We`re advancing technology standards in industry and research. Which is why the world`s leading scientists and innovators trust attocube`s products.
The NanoFactory – Join the future!
Innovation requires the unconventional – which is why we think outside the box. We`re open, dynamic, flexible, and globally oriented, a state of mind that`s reflected in our headquarters. It`s where about 150 team members get to spend their days innovating!
For us, the NanoFactory is far more than a mere building. It’s been designed – from the very foundation to it`s rooftop – with the core goal of promoting teamwork and transparency at all levels. It’s a bright, light-drenched thinktank and innovative meeting space for employees, customers, and business partners alike. We look forward to meeting you there!

Forward thinker? Innovator? Curious?
Get latest customer applications, product news, and publications straight into your inbox.
Sign up for our newsletter