
IDS Sensors – Interfaces
real-time digital and industrial connectivity
The IDS3010 is delivered with a standard set of high-speed interfaces for real-time data communication with FPGA-based or RTOS receivers. These interfaces consist of an incremental AquadB, a proprietary serial word (HSSL), a synthetic analog sin/cos, and a linear analog output signal.
All signals can be outputted as either single-ended (LVTTL) or differential (LVDS). Interface parameters can be configured in the web interface section of the IDS. Alternatively, the IDS can optionally be upgraded with BiSS-C, an open standard sensor interface optimized for multi-device usage. All interfaces provide maximum bandwidth at highest resolution.

- GPIO – General Purpose Input/Output: BiSS-C (real-time)
- Main Power
- Ethernet
- HSSL, AquadB, sin/cos, linear analog (real-time)
- ECU
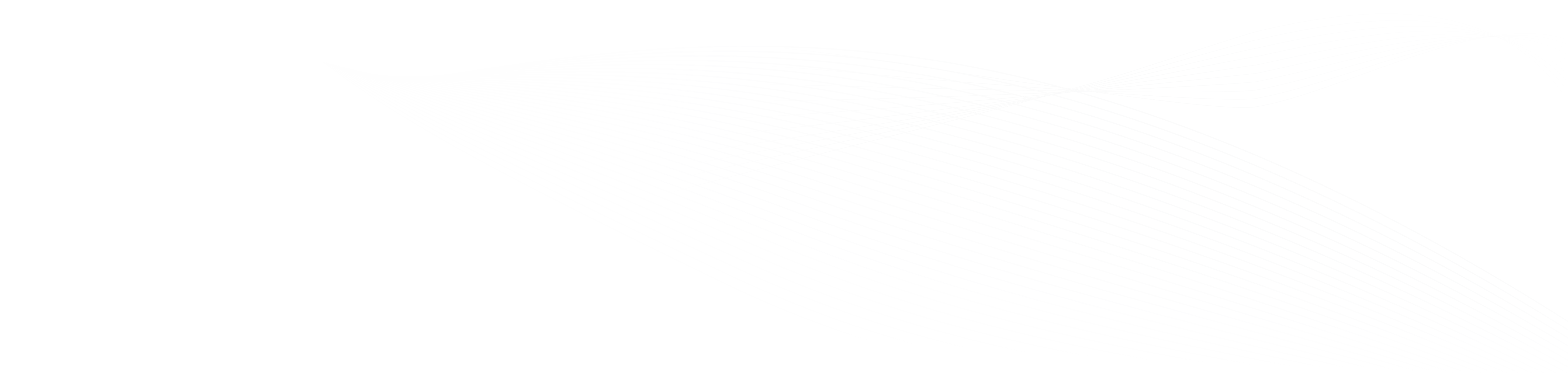
HSSL (digital; bandwith up to 25 MHz and 8-48 bit resolution): attocube’s proprietary serial word protocol provides absolute position information - both in terms of the protocol and the measurement itself. The HSSL interface consists of one data and one clock signal (single ended or differential); position information is packed into one container of user-defineable bit-length, synchronization with the receiver is accomplished using the clock signal.

Linear Analog Output (analog; bandwidth up to 25 MHz; resolution freely assignable, 1pm-212 pm): The linear analog output interface is a digitally
synthesized analog signal for high-frequency vibrometry applications. It enables the direct post-processing of measurement data with a, AC-coupling of 1.7 V. An adaptable highpass filter prevents a drifting of the signal. The linear analog output is best used with differential signaling.
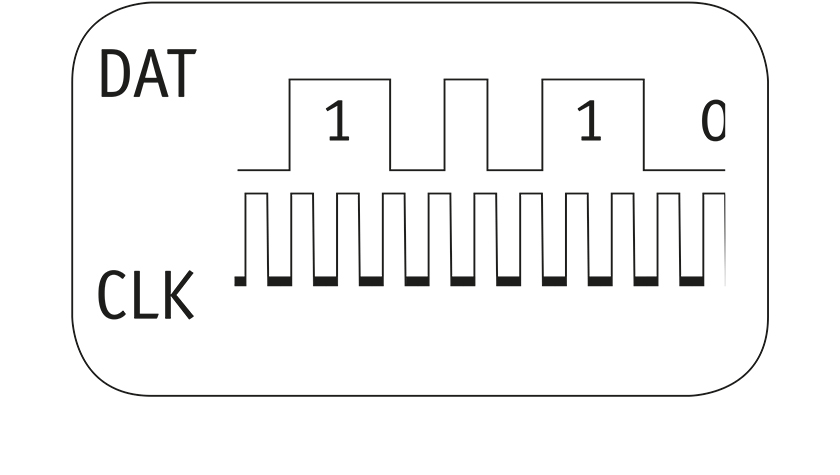
AquadB (digital; bandwith up to 25 MHz; resolution freely assignable): The AquadB interface provides incremental displacement information on target displacement. Position resolution and (maximum) clock rate can be user defined using the IDS web interface.
For maximum data bandwidth, the AquadB interface is best used with differential signaling.
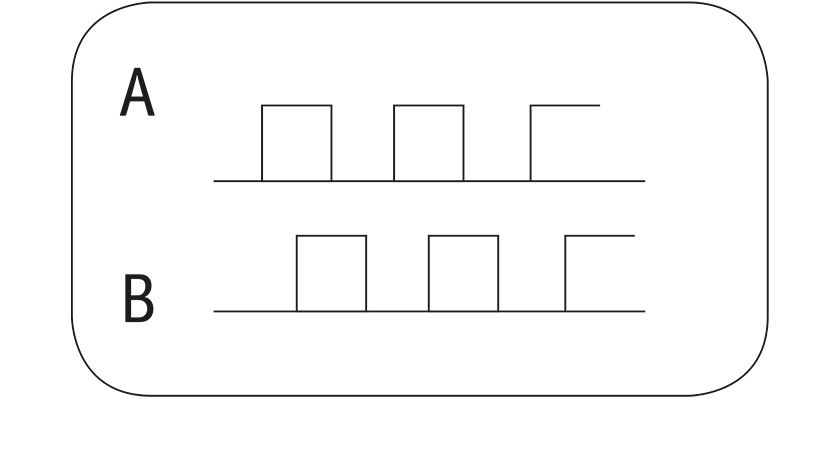
Sin/cos (analog; bandwith up to 25 MHz; resolution freely assignable, 1pm - 224 pm): The sin/cos signal is a digitally synthesized analog signal which provides incremental position information. As with the digital AquadB signal, the increment (i.e. resolution) is user-definable in the system’s web interface. For maximum data bandwidth, the sin/cos signal is best used with differential signaling.

BiSS-C (digital; bandwidth up to 10 MHz; resolution freely assignable, 1pm – 215 pm) is available as an own version of the interferometers. It provides point-to-point topology for data communication with motion controllers and is especially suitable for the easy integration of several sensors to an external master clock at multi device facilities such as synchrotrons and spallation sources. BiSS-C signals are routed through the 14 pin GPIO connector (all other real-time interfaces are discabled in this mode) and they are based on the differential RS- 422 standard.

| Interface Specifications | |||||
|---|---|---|---|---|---|
| target velocity [m/s] | 0.0001 | 0.001 | 0.01 | 1 | 2 |
| resolution HSSL (abs.) 8-48 bit, up to 25 MHz [nm] | 0.001 | 0.001 | 0.001 | 0.001 | 0.001 |
| resolution AquadB (inc.) at 25 MHz [nm] | 0.004 | 0.04 | 4 | 40 | 80 |
| resolution Sin/Cos (inc.) at 25 MHz [nm] | 0.004 | 0.04 | 4 | 40 | 80 |